










Servicios Personalizados
Articulo
 pdf en Inglés
pdf en Inglés Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Permalink
PermalinkLatin American applied research
versión On-line ISSN 1851-8796
Lat. Am. appl. res. vol.43 no.4 Bahía Blanca oct. 2013
Application of nano-contact mechanics models in manipulation of biological nano-particle
M. H. Korayem and Z. Rastegar
Robotic Research Laboratory, School of Mechanical Engineering, Iran University of Science and Technology, Tehran, Iran. hkorayem@iust.ac.ir
Abstract— Contact mechanics is related to the study of the deformation of solids that meet each other at one or more points. The physical and mathematical formulation of the problem is established upon the mechanics of materials and continuum mechanics. Contact mechanics gives essential information for the safe and energy efficient design of various systems. During manipulation process, contact forces cause deformation in contact region which is significant at nano-scale and affects the nano-manipulation process. Several nano-contact mechanics models such as Hertz, DMT (Derjaguin, Muller and Toporov), JKR (Johnson, Kendall, Roberts), BCP (Burnham, Colton, Pollock), MD (Maugis, Dugdale), COS (Carpick, Ogletree, Salmeron M ), PT (Pietrement, Troyon), and Sun have been applied as the continuum mechanics approaches at nano-scale. Recent studies show interests in manipulation of biological cells which have different mechanical properties. Low young modulus and consequently large deformation makes their manipulation so sensitive. In this article contact mechanics models are used for biological cell, in air and liquid environment, then results will be compared with Tatara contact mechanics model. Since biological cells are mostly modeled as visco- or hyper-elastic materials, this model will be more compatible with their condition.
Keywords— Contact Mechanics Models; Biological Cell; Nano-manipulation; Large Deformation.
I. INTRODUCTION
It is now well known that biological cells sense the mechanical changes in their environment. The out coming response to mechanical changes is determinative in controlling the cell's action. Realizing the mechanical behavior of the cell, first needs a precise knowledge of both force and stress distribution within the contact area.
This feature is crucial since determining the force/stress of various types of load can dictate the mechanical cell response (Girot et al., 2006).
Pursuant to literature, much endeavor has been dedicated to recognize the mechanism by which the cell perceives the external mechanical actuations. In fact, many methods have been developed, whether to mechanically stimulate cells, sense force distributions or to determine the mechanical properties of the cells (Lukkari and Kallio, 2005). Among these methods, the most promising ones involve Scanning Probe Microscopy (SPM) techniques for the nano-scale level (Girot et al., 2006). However, the Atomic Force Microscope (AFM) has become a commonly used tool in the field of bioscience.
The original work in contact mechanics dates back to 1882 with the publication of the paper "On the contact of elastic solids" by Heinrich Hertz. It gives the contact stress as a function of the normal contact force, the radii of curvature of both bodies and the modulus of elasticity of both bodies (Johnson 1985).
It was not until nearly one hundred years later that Johnson, Kendall, and Roberts found a similar solution for the case of adhesive contact. Johnson et al. model came to be known as the JKR model for adhesive elastic contact.
Further advancement in the field of contact mechanics in the mid-twentieth century may be attributed to names such as Bowden and Tabor. Bowden and Tabor were the first to emphasize the importance of surface roughness for bodies in contact. The works of Bowden and Tabor yielded several theories in contact mechanics of rough surfaces (Tatara 1991).
However, these developments are confined to the case of small deformation and based on point or line contact of half-space elastic body model and problems of large deformations in simple compression of elastic spheres as well as elastic bodies have remained unsolved. Tatara (1991) proposed a new model which was the extension of Hertz mechanics model for hyper-elastic material like rubber.
The organization of this article is as follows: interaction forces which are important in liquid environment are studied and their effects in contact mechanics models are applied. Then small deformation contact models for gold nano-particle and biological nano-particle will be compared. In addition Tatara large deformation model will be simulated for two different kinds of biological cells and its results will be compared with small deformation models.
II. THEORY
A. Contact Mechanics Models
Contact mechanics models are used in different literature. But since these models have been developed for special conditions their application in other situation would encounter problems and limitations. Most models are applicable in small deformations, but a large deformation model will be investigated in this paper which invokes a non-linear elastic response and a large deformation formulation. In this model the influence of adhesion and the effects of interfacial friction are not considered, but still seems to be an appropriate model to use in biological applications (Tatara 1991).
Tatara theory
The original Hertz model for a small deformation of a half-sphere of radius R1 under compressive contact with a spherical probe of radius R2 predicts that the force, F, depends on the 1.5th power of δ. In the subsequent formulas, subscript 1 and 2, respectively, denote the quantities for the sample and the tip, with common notations of E and v, respectively, for Young's modulus and Poisson's ratio:
 | (1) |
where R=R1R2 / (R1+R2), δ is particle deformation and  .
.
In Tatara theory, by using the same symbol a as above, F is given as:
 | (2) |
where
B. Interaction Forces
Due to DLVO (Derjaguin, Landau, Verwey, Overbeek) theory and direct measurement of surface forces conducted in aqueous media, the total interaction force (Ft) between two lyophobic particles in a medium can be expressed as follows (Israelachvili and Pashley 1983):
 | (3) |
where Fhyd represents the hydration force, Fe electrical double-layer force and Fd the van der Waals force.
Different works for different electrolytes have been done. The work done by Grabbe and Horn (1993) showed that hydration force changes just a little with the changes in surface treatment and electrolyte concentration. The measured hydration forces could be fitted to a double-exponential function of the form:
 | (4) |
where C1,2 are the strength of the long-ranged forces and D1,2 are the related Decay lengths.
III. RESULTS
Studies show that DNA can be considered as a nano-scale spherical pack (Arsuaga et al., 2002). So to simulate nano-scale biological cell behavior in contact moment, a pack of DNA was considered. Since biological cells, such as DNA, live in biological environment, four different kinds of liquids are used to identify the effect of biological environment on DNA behavior. Since the liquid environment affects the interaction forces so forces in different liquids are simulated to find out the effectiveness of these forces in manipulation of biological cell.
In order to calculate the interaction forces some parameters such as Hamaker constant are needed. The calculation of this parameter is as follows (Israelachvili, 1991):
 | (5) |
where, KB is Boltzman coefficient. T is temperature in Kelvin. ε;1 is dielectric constant for tip. ε;2 is dielectric constant for sample and ε;3 is dielectric constant for environment. Calculated Hamaker constant for liquids are shown in Table 1. Table.2 shows the parameter needed to calculate the hydration force. DNA and AFM tip properties are shown in Table.3.
Table 1. Liquid properties (Yoon and Vivek, 1998)
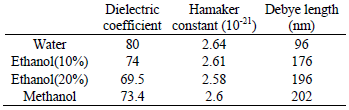
Table 2. Hydration force constants(Yoon and Vivek 1998)
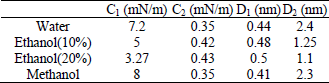
Table 3. DNA and AFM tip properties (Israelachvili and Pashley, 1983)

Figure 1 shows van der Waals force variations for different liquids in contact area. As shown in this figure, in separation distance which is about 0.165 nm, this force is approximately zero for these liquids. Since Hamaker constants for different liquids were appro-ximately the same and have very small differences, the forces' curves are similar. As mentioned before van der Waals force is dependent on Hamaker constant. The
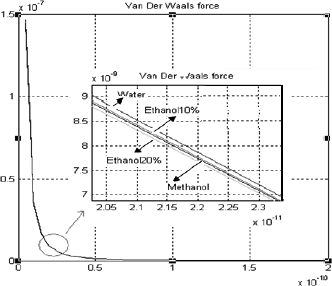
Fig. 1. Van der Waals forces vs. separation distance
magnified figure of the van der Waals force shows direct relationship between this force and Hamaker coefficient of the liquid.
Figure 2 shows hydration force variation for different liquids. As shown in the Fig.3, hydration forces decrease by increasing the distance, which results in ignorable hydration force at 0.165nm. The other considerable result is significant decrease in hydration force for ethanol 10% compared with water which shows the effect of concentration of the solvent on hydration force (Yoon and Vivek, 1998).
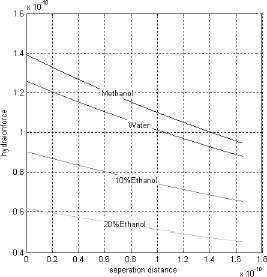
Fig. 2. Hydration forces in different liquids
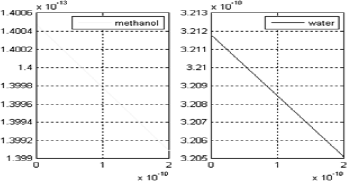
Fig. 3. Electrical double layer force for water and methanol
Figures 3 and 4 show the electrical double layer forces in liquids. Again these forces are too small in contact moment to be considered.
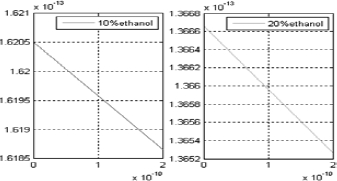
Fig. 4. Electrical double layer force for ethanol 10% and ethanol 20%
Despite being insignificant, these forces have been calculated and added to external force to show the difference between results in liquid and air environment (Figs. 5 and 6).
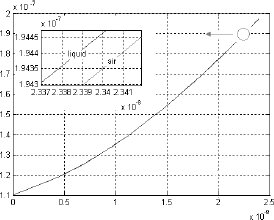
Fig. 5. DMT force- displacement curve in air and liquid
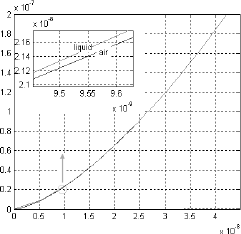
Fig. 6. Hertz force- displacement curve in air and liquid
As expected, simulation shows that calculated interaction forces for fluid environment do not play an important role in manipulation and at the contact moment. So it can be concluded that contact mechanics models in liquid and air environment have ignorable differences. The same results have been obtained for gold nano-particle (Korayem et al., 2011). Since most of the interaction forces are repulsive, as shown in magnified Fig. 6, to have the same deformation in liquid environment more applied force is needed in comparison with air.
Differences between various contact mechanics models results for gold nano-particle and biological cell have been shown simulating the contact moment. For both gold nano-particle and DNA, as shown in Figs. 7 and 8, rising of pushing force will increase the indentation depth and contact area. Disregarding the adhesion force by Hertz theory may result in underestimating the indentation depth. So this model cannot be used for all systems. It can be applied only for non-adhesive contacts with small deformation. In contrast JKR contact mechanics model considers the greatest adhesion force so the indentation depth obtained from this model is high. Consequently JKR model provides the greatest contact area and the smallest contact radius is estimated by Hertz theory. DMT model has the lowest adhesion force. Therefore, this model is approximately similar to Hertz model and provides small indentation depth. BCP adhesion force and indentation depth is between JKR and DMT models. MD model does not have limitations of other models, so depending on deformation its graph can fall down the other models' graphs. But since MD is an analytical model, other empirical models such as PT or COS are used for complex systems. These models have more flexibility and easier calculation.

Fig. 7. Contact mechanics models for gold nano-particle
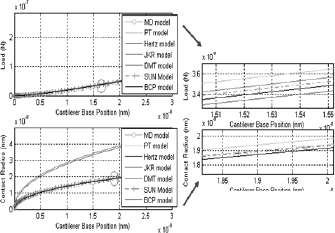
Fig. 8. Contact mechanics models for DNA
Since Tatara theory is the expanded model of Hertz theory for hyper-elastic material, the comparison is done between these two models (Fig. 9). Small deformation contact mechanics models depict that the softer the nano-particle becomes, the contact area rises, while the applied load declines with sharp slope. But as mentioned before, biological cells are visco or hyper-elastic materials and these kinds of materials have damping properties which does not let the material to deform so much due to small forces. Since Tatara theory is a large deformation model established for a hyper-elastic material DNA deformation is simulated with it. Results show that using this model the slope of force- deformation curve is slower which is closer to the actual situation. Therefore, it is suggested to use this model for biological cells.
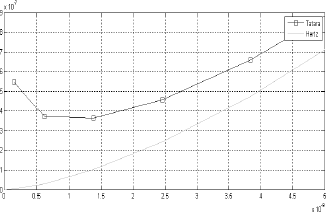
Fig. 9. Comparison of Tatara and Hertz models for DNA
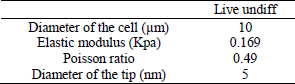
The same comparison is done between simulation of Tatara model for another biological cell and its experimental results. This comparison will prove our claim about validity of applying Tatara model for a biological cell. In this part a mouse embryonic stem cell is used. Its properties are shown in Table.4.
Table 4. Mechanical properties of live mESM (Ladjal et al., 2009)
As shown in Fig.10 (a) Tatara model curve is more compatible with experimental data provided in Fig. 10 (b). This result for mESC proves that, as it mentioned before for DNA, Tatara contact mechanics model is more appropriate to use in biological cells behavior analysis at the contact moment and under applied load.
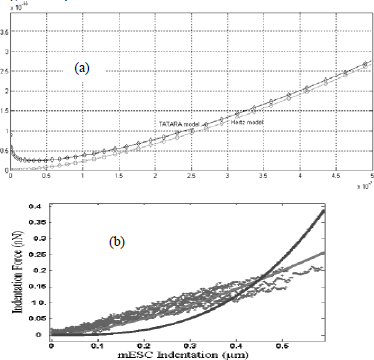
Fig. 10. (a) Comparison between Tatara and Hertz model for mESC (b) Experimental curve
IV. CONCLUSION
In this article, different small deformation contact mechanics models in manipulation of biological cell at contact moment were simulated. Since biological cells live in biological environment, four liquids were considered, in which biological cells can be kept. Due to DLVO theory two major forces, van der Waals and electrical double layer forces, should be added to external force which is exerted by AFM tip. Although DLVO theory was proved to be practical for biological environment, literature showed that non-DLVO forces such as hydration forces are also important. So, to modify contact mechanics models for biological condition, three major forces were added to external force, van der Waals, electrical double layer and hydration forces. Contact moment of manipulation was simulated for nano-scale DNA of 50 nm radius submerged in pure water and three other biological fluids.
Results for van der Waals force show that this force in every four fluid tends to be zero in separation distance of 0.165 nm and it can be ignored in contact theories. Electrical double layer and hydration forces are also ignorable due to their small values. Although forces' values were ignorable, they have been added to the external force in JKR, DMT, Hertz and BCP theories to see the differences between these models in air and liquid environment. Results show that these theories for air and liquid environment are approximately the same. This conclusion is analogous to gold nano-particle (Korayem et al., 2011).
Small deformation contact mechanics models simulation results for DNA were compared to gold nano-particle. Since DNA is about 1000 times softer than gold nano particle, larger deformations was expected. Results comparison proved this idea. To deform gold nano-particle about 2.5x10-6 (m), the force should be 1000 times greater in comparison to DNA.
Since Tatara theory is the expanded model of Hertz theory for hyper-elastic material, the comparison has been done between these two models (Fig. 10). Small deformation contact mechanics models depict that the softer nano-particle becomes, the contact area rises, while the applied load declines with sharp slope. But as mentioned before, biological cells are visco or hyper-elastic materials and damping properties of these kinds of materials does not let them to deform so much due to small forces. It means that the force-deformation curve does not have sharp slope. Tatara theory as a large deformation model established for a hyper-elastic material has been used for DNA simulation. Results show that using this model the slope of force- deformation curve is slower which is closer to the actual situation, so it is suggested to use this model for biological cell. To verify the results obtained for DNA, simulation is done for mESC which experimental curve is available. Results' comparison shows that Tatara theory is more compatible with experimental data.
Finally, it should be mentioned that for an accurate biological cell manipulation in liquid media, more studies about contact moment and deformations are needed. Since in vivo biological environment has different properties, study of contact moment and manipulation of biological cell in this environment can be more useful.
REFERENCES
1. Arsuaga, J.R.K., Z. Tanb, M. Vazqueza, D.W. Sumnersa and S.C. Harveyb, "Investigation of viral DNA packaging using molecular mechanics models," Biophysical Chemistry, 101-102, 475-484 (2002).
2. Girot, M., M. Boukallel and S. Régnier, "A hybrid micro-force sensing device for mechanical cell characterization," In: Proc. of the Int. Conference on Instrumentation and Measurement Technology, 501-506 (2006).
3. Grabbe, A. and R.G.J. Horn, "Double-Layer and Hydration Forces Measured between Silica Sheets Subjected to Various Surface Treatment," Colloid Interface Sci., 157, 375-383 (1993).
4. Israelachvili, J.N. and R.M. Pashley, "Molecular layering of water at surfaces and origin of repulsive hydration forces," Nature, 306, 249-250 (1983).
5. Israelachvili, J.N., Intermolecular and Surface Forces, 2nd Ed. Academic Press, San Diego (1991)
6. Johnson, K.L., Contact mechanics, Cambridge university press, 1st edition (1985).
7. Korayem, M.H., A. Motaghi and M. Zakeri, "Dynamic modeling of submerged nanoparticle pushing based on atomic force microscopy in liquid medium", J Nanopart Res, 13, 5009-5019 (2011).
8. Ladjal, H., J.L Hanus, A. Pillarisetti, C. Keefer, A. Ferreira and J.P. Desai, "Atomic Force Microscopy-Based Single-Cell Indentation: Experimentation and Finite Element Simulation," IEEE/RSJ International Conference on Intelligent Robots and Systems, 1326-1332 (2009)-
9. Lukkari, M. and P. Kallio, "Multi-purpose impedance-based measurement system to automate microinjection of adherent cells," Proc. of the Int. Sympos. on Computational Intelligence in Robotics and Automation, 20-26 (2005)
10. Tatara, Y., "On compression of rubber elastic sphere over a large range of displacements," Journal of Engineering materials and Technology, 113, 285-293 (1991).
11. Yoon, R. and S. Vivek, "Effects of Short-Chain Alcohols and Pyridine on the Hydration Forces between Silica Surfaces," Journal of Colloid and Interface Science, 204, 179-186 (1998).
Received: July 20, 2012
Accepted: December 12, 2012.
Recommended by Subject Editor: Marí Lujá Ferreira.
